
医工学コース
教 授 後藤 聡 (GOTO Satoru)
E-mail:goto [at] cc.saga-u.ac.jp (メールアドレスは [at] を@に変更してください)
 |
|
| 専門分野: | 制御工学, 船舶海洋工学 |
| 所属学会: | Asian Control Association,IEEE,精密工学会,日本ロボット学会,システム制御情報学会,計測自動制御学会 |
佐賀大学教員総覧データベース 研究室HP
システム制御とその応用に関する研究を行っています.制御とは,機械や設備が目的通り作動するように操作すること(広辞苑第6版より)で,具体的には,海洋温度差発電プラントやロボットを制御対象とした研究開発を行っています.
詳細はシステム制御研究室のホームページを参照して下さい.
 海洋温度差発電プラント制御
海洋温度差発電プラント制御
海洋温度差発電とは,海洋の表層部の温海水(25-30℃)と深層の冷海水(5-9℃)の温度差を用いて発電する仕組み(http://ja.wikipedia.org/wiki/海洋温度差発電)であり,海洋温度差発電プラント(図 1)のモデリング(図 2,図 3)と制御や,遠隔地からプラントを操作するシステムの開発(図 4)を行っています.
図 1 佐賀大学海洋エネルギー研究センターに設置されている海洋温度差発電実験装置
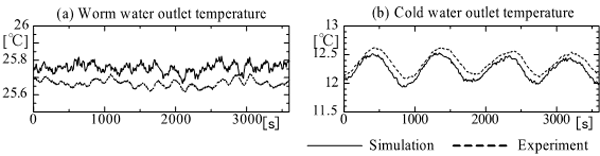
図 2 海洋温度差発電モデルによるシミュレーション結果
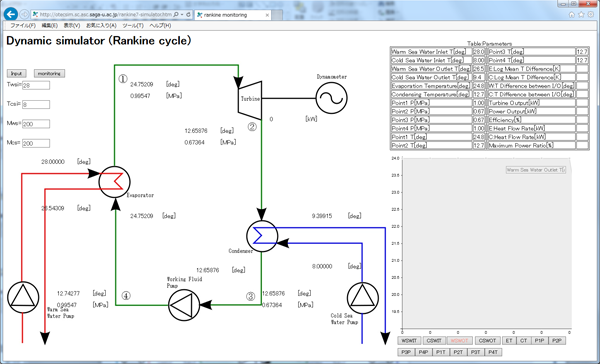
図 3 海洋温度差発電モデルを用いた動的シミュレータ
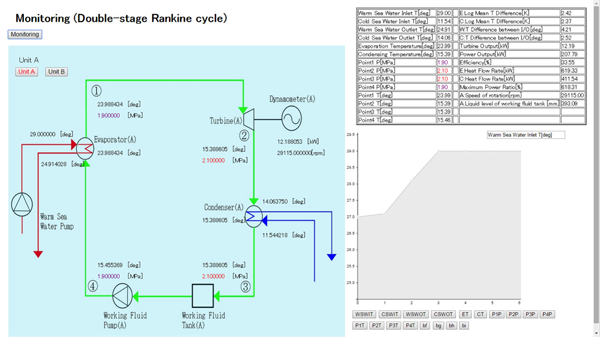
図 4 海洋温度差発電プラント遠隔監視システム
ロボット制御
ヒトの生体から得られる生体信号である筋電図や眼電図を用いて移動ロボットを操作する研究(図 5,図 6)を行っています.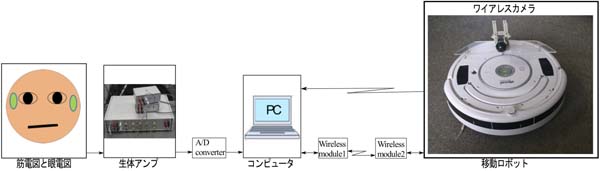
図 5 生体信号を用いた移動ロボット操作システム
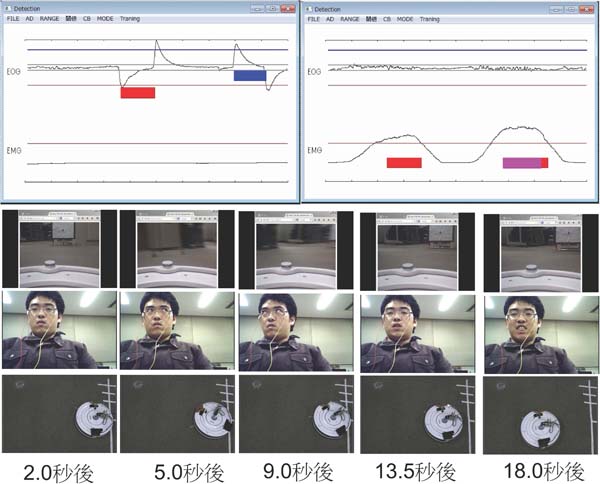
図 6 生体信号を用いた移動ロボット操作システム実験結果
 |
 |
 |
 |